SDV-UN-Web-App
02 August 2021A single web aplication used as GUI for SDV mobile robots in the ExFacLab.
The Experimental Fabric Laboratory (ExFacLab) is in the National University of Colombia and has with multiple machines and robots, that conforms different manufacturing cells: every cell contains different machines that makes an specific task, as prototyping or machining parts. The SDV robots (Self Driving Vehicles) are in charge of transporting parts between the different manufacturing cells of the laboratory. They are autonomous, because they can avoid obstacles and arrive to specific points in the laboratory without any supervision. Every SDV has a high precision, long-range Lidar among a on board computer NUC brand from Intel. The operative system is Ubuntu 18.04 and the navigation software runs in ROS platform (Robot Operative System).

Alternatives to operate the SDV robots
At the time to start the development of this project, there are multiple ways to put movement commands to the mobile robot. These are:
- Using RViz: An application that belongs to the official packages of ROS. Very complete, because allows to see all the information that the mobile robots generates, but highly dependant of Ubuntu/Linux distribution packages.
- Remote terminal: using the SSH protocol, we can send commands to the robot, but we can see simultaneously the current position or the destination. Also, is very difficult to use for beginner users.
Both ways to operate the SDV robots are complex and the users needs a previous preparation. For these reasons, the need to create a simpler solution arises, a solution with high availability and much simpler than the others.
How works the web aplication
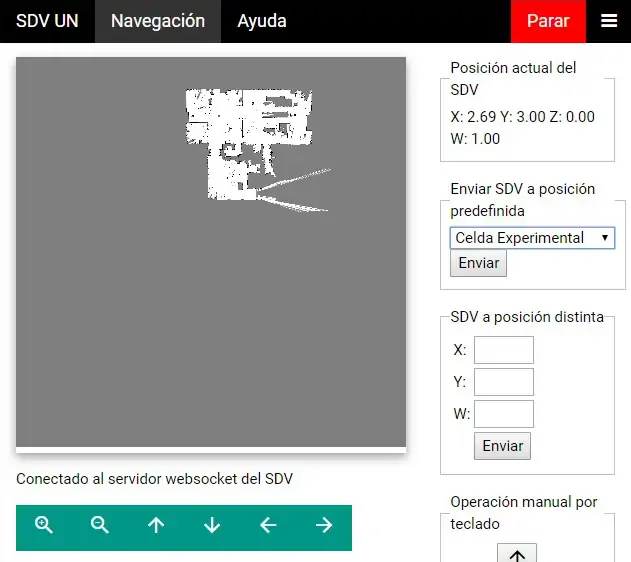
The developed web application has a map of the laboratory and contains multiple lateral panels that allows to:
- See the position values of a single SDV robot.
- Send a predefined position to the SDV robot.
- Send a position, different to the predefined positions.
- Use manual operation buttons.
Also, tha application includes multiple buttons for map image manipulation, as Zoom In, Zoom Out and image displacement.
When a SDV robot connects to the wireless network, the robot appears in the application as al color arrow over the map. By clicking ont the map, the new position is sended immediately to the robot. If a route to the objective exists, the robot begins to move. To add security to the robot operation, a emergency stop button is incorporated to the top bar.
Other added functions are:
- Help contents for troubleshooting
- Access control: only identified users can use the application
Used software
This web application uses different open source tools:
- roslibjs: library written in Javascript, intended for communication between robots. Use websockets to send and receive data. Used in the client side.
- nav2djs: library written in Javascript used to draw the mobile robot maps from ROS. Used in the client side.
- XAMPP: software package with useful applications that can be used to mount a web server. The mySQL database is used for users and passwords management, the PHP server adds authentication characteristics and the Apache server is used as web hosting service.
This project also contains a Vanilla version, that removes the security features allowing a simple execution of the web application, needing only a simple Apache server or a service in Nodejs and Express.js. The source code is open and it’s hosted in Github.
Sample Video
The next video shows an usage sample with an SDV robot in the ExFacLab.

Links
- Robot Web Tools: A set of libraries to develop web applications.
- Source Code on Github