SDV-UN-Web-App
02 Agosto 2021Una aplicación Web sencilla, diseñada para usarse como GUI (interfaz gráfica de usuario) para el control de los robots móviles SDV del laboratorio LabFabEx.
El laboratorio LabFabEx se encuentra en la Universidad Nacional de Colombia, sede Bogotá y cuenta con múltiples máquinas y robots, los cuales conforman distintas celdas de manufactura: cada celda concentra diferentes máquinas que llevan a cabo una tarea específica, como prototipado o mecanizado de piezas. Los robots SDV (Self Driving Vehicles, *Vehículos autónomos) son los encargados de transportar piezas entre las distintas celdas del laboratorio. Son autónomos, ya que pueden evadir obstáculos y llegar a puntos específicos del laboratorio sin supervisión. Llevan un sensor Lidar de alta precisión y alcance junto a un computador a bordo de la marca NUC del fabricante Intel. El sistema operativo de los robots es Ubuntu 18.04 y el software de navegación de los robots corre en la plataforma ROS (Robot Operative System).

Formas de operar los robots
Al momento de desarrollar el proyecto, las formas de ingresar comandos de movimiento a los robots SDV eran las siguientes:
- Usando RViz: Una aplicación perteneciente a los paquetes oficiales de ROS. Muy completa, ya que permite visualizar toda la información que genera y procesa el robot (topics), pero altamente dependiente de la plataforma Linux.
- Terminal remoto: por medio del protocolo SSH se le pueden enviar comandos al robot, con el problema de no poder visualizar simultáneamente la posición actual del robot o el destino. Además, es difícil de usar por parte de los usuarios novatos.
Ambas formas de operar a los robots son complejas de usar y requieren de una preparación previa. Por estas razones surge la necesidad de crear una interfaz de usuario independiente de la plataforma, con alta disponibilidad y fácil de usar.
Funcionamiento de la aplicación web
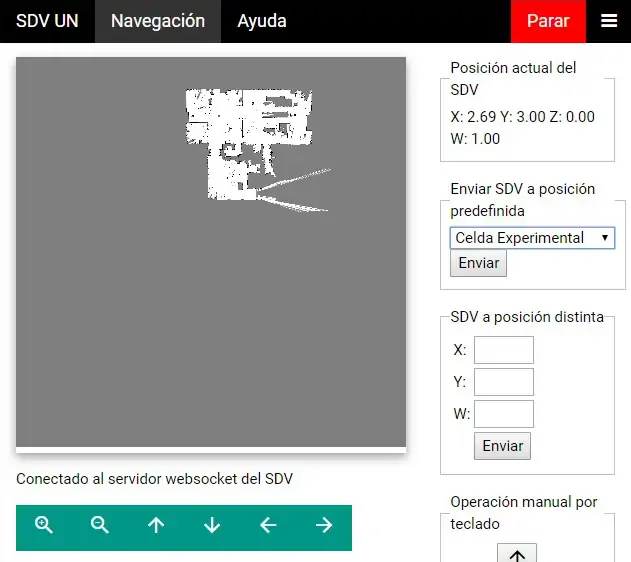
La aplicación web creada consta de un mapa del laboratorio y paneles laterales que permiten:
- Observar los valores de posición que reporta el robot SDV.
- Enviar al robot una posición predefinida dentro del laboratorio
- Enviar una posición distinta a las predefinidas
- Botones de navegación manual
Además, se incluyen botones para la manipulación de la imagen del mapa, como Zoom In, Zoom Out, y botones de desplazamiento.
Cuando un robot SDV se conecta a la red, aparece en la aplicación como una flecha de color sobre el mapa. Al hacer click en el mapa, la nueva posición se envía de forma inmediata el robot. Si existe una ruta que permita al robot llegar a tal punto, el robot empieza a moverse. Para añadir seguridad a la operación, se incorporó en la barra superior un botón de parada de emergencia, la cual detiene al robot de forma inmediata.
Otras funciones añadidas a la aplicación web son:
- Contenidos de ayuda para la resolución de problemas
- Control de acceso: solo usuarios identificados pueden acceder a la aplicación
Software utilizado
La aplicación utiliza distintas herramientas de software libre:
- roslibjs: biblioteca escrita en Javascript para la comunicación con los robots. Usa websockets para el envío y lectura de datos. Utilizado en el lado del cliente.
- nav2djs: biblioteca escrita en Javascript para el trazado de mapas de robots móviles que funcionan con ROS. Utilizado en el lado del cliente.
- XAMMP: Paquete de software con aplicaciones útiles para el montaje de servidores web. Se utiliza la base de datos mySQL para la gestión de usuarios, el servidor PHP para añadir características de seguridad y Apache para el servicio web.
El proyecto también tiene una versión vanilla, la cual remueve las características de seguridad e identificación de usuarios, permitiendo ejecutar la aplicación desde un sencillo servicio de Apache o con un servicio montado en Nodejs y Express.js. El código fuente es de acceso libre y se encuentra hospedado en Github.
Ejemplo de uso
En el siguiente video se observa un ejemplo de uso con los robots SDV dentro del laboratorio LabFabEx.

Enlaces
- Robot Web Tools: Colección de paquetes de software pensados para la construcción de aplicaciones para robots.
- Código fuente en Github